器人焊接") |
|
塞拉門機(jī)器人焊接
 發(fā)聯(lián)系信
發(fā)聯(lián)系信聯(lián)系信息
- 邵經(jīng)理
- 電話:
0519-88370668,88770167 - 傳真:0519-88770167
- 地址:江蘇省常州市武進(jìn)橫林迎賓路129號
- 產(chǎn)品詳情
海寶公司導(dǎo)航頁:ABB機(jī)器人發(fā)那科機(jī)器人 OTC機(jī)器人安川機(jī)器人
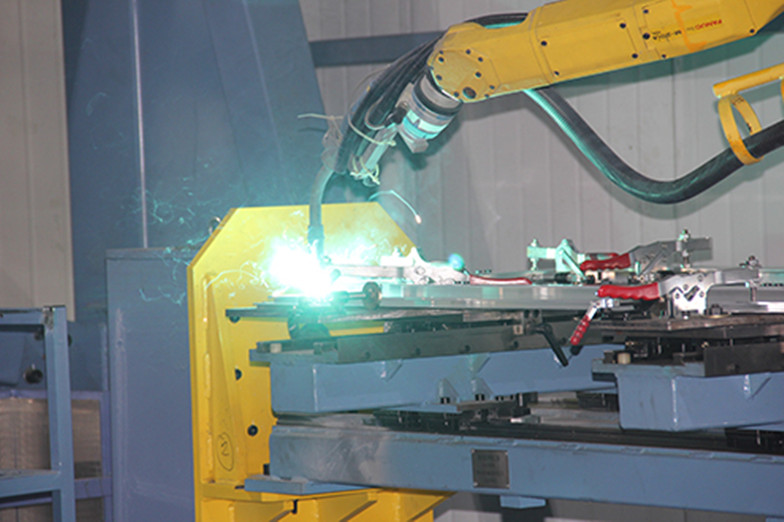
常州海寶焊接機(jī)器人機(jī)械手在軌道交通行業(yè) 自動化焊接鋁合金門框 塞拉門框焊接機(jī)器人工作站 地鐵門焊接機(jī)器人 風(fēng)擋 中頂板 鋁合金焊接機(jī)器人視頻案例:
常州市海寶焊割有限公司是一家全世界首條高鐵門系統(tǒng)鋁焊接生產(chǎn)線
生產(chǎn)廠家,產(chǎn)品有:塞拉門機(jī)器人焊接工作站,地鐵門自動焊接機(jī)器人多少錢,自動焊接機(jī)器人品牌,進(jìn)口焊接機(jī)器人,最好的焊接機(jī)器人,蘇州機(jī)器人焊接,泰州焊接機(jī)器人,自動焊機(jī)器人,國產(chǎn)焊接機(jī)器人品牌,焊接機(jī)器人培訓(xùn),自動焊接機(jī)器人上海,焊接機(jī)器人解決方案的生產(chǎn)廠家,海寶強大的工程師團(tuán)隊為您盡心服務(wù)。邵經(jīng)理:177-5158-3908。

l 龍門雙機(jī)器人倒裝機(jī)構(gòu)+M型頭尾架變位機(jī),16軸聯(lián)動系統(tǒng);
l 系統(tǒng)一元化控制,16軸聯(lián)動;
l 可實現(xiàn)最大4米*2米工件焊接能力;
l 機(jī)器人FANUC-M-20iA/10L,焊接電源伊薩350A;
l 機(jī)器人6軸,負(fù)載10kg,最大運動半徑2009mm;
l 帶起始點尋位功能和電弧跟蹤、多層多道焊接功能;

- 塞拉門弧焊機(jī)器人工作站的以某公司手工焊接的塞拉門鋁鎂硅合金框架為研究對象在FANUC工業(yè)機(jī)器人本體及輔助裝置基礎(chǔ)上進(jìn)行塞拉門鋁鎂硅合金框架弧焊機(jī)器人工作站的開發(fā)研究焊縫自動跟蹤技術(shù)、焊接溫度場實時檢測技術(shù)等以保證焊接質(zhì)量。

關(guān)鍵詞塞拉門鋁鎂硅合金弧焊機(jī)器人中圖分類號文獻(xiàn)標(biāo)識碼文章編號—焊接機(jī)器人是在工業(yè)機(jī)器人的基礎(chǔ)上發(fā)展起來的先進(jìn)焊接設(shè)備由焊接專機(jī)開始到焊接機(jī)器人、焊接機(jī)器人工作站直到目前的焊接柔性生產(chǎn)線。
國際上越來越廣泛的采用焊接機(jī)器人系統(tǒng)代替人工焊接。
焊接機(jī)器人生產(chǎn)的柔性、焊接工藝的優(yōu)越性對勞動強度和工作進(jìn)程的改善對產(chǎn)品質(zhì)量的提高以及縮短工作時間提高工作效率和降低成本逐漸為人們所認(rèn)識和接受。
美國的卡特比勒、瑞典的沃爾沃、德國的利渤海爾、寶瑪格等公司均大量采用焊接柔性生產(chǎn)線而日本的本田、鈴木、雅馬哈等摩托車行業(yè)幾乎全部采用焊接機(jī)器人生產(chǎn)主要結(jié)構(gòu)件。
在焊接生產(chǎn)領(lǐng)域中應(yīng)用焊接機(jī)器人已成為一個國家焊接技術(shù)和焊接自動化水平的重要標(biāo)志。
弧焊機(jī)器人在汽車、摩托車、通用機(jī)械、金屬結(jié)構(gòu)件、城軌車輛等諸多行業(yè)中都有廣泛的應(yīng)用。
然而塞拉門鋁鎂硅合金框架弧焊機(jī)器人工作站在國內(nèi)城市軌道及高速列車塞拉門行業(yè)中的應(yīng)用尚未見報導(dǎo)。
國內(nèi)城市軌道車輛、高速列車的迅猛發(fā)展使得塞拉門生產(chǎn)逐年猛增品種不斷翻新但鋁鎂硅合金框架等主要零部件仍為手工焊接對工人技術(shù)水平要求頗高效率低焊接質(zhì)量欠佳優(yōu)質(zhì)品率低是制約我國塞拉門產(chǎn)品升級的關(guān)鍵技術(shù)。
鋁鎂硅合金框架弧焊機(jī)器人工作站的建立和完成使收稿日期—
企業(yè)塞拉門設(shè)計制造的技術(shù)達(dá)國內(nèi)領(lǐng)先水平。
同類產(chǎn)品國外造價過高故研發(fā)此鋁鎂硅弧焊機(jī)器人工作站可使國產(chǎn)塞拉門產(chǎn)品具有國際競爭力使塞拉門生產(chǎn)實現(xiàn)占領(lǐng)國內(nèi)市場進(jìn)軍國際市場的目標(biāo)由此可產(chǎn)生顯著的社會效益和經(jīng)濟(jì)效益。
工藝分析焊接基本條件塞拉門鋁合金框架焊接組件圖如圖所示焊接基本條件為洱’三一鰣焊縫序號為順時針皿、噸Ⅱ”圖塞拉門鋁合金框架焊接組件圈焊接工件材料鋁鎂硅合金焊縫形式角接或?qū)雍缚p。
工藝方案研究考慮康尼公司塞拉門生產(chǎn)的品種、型號、規(guī)格、批量特點及經(jīng)濟(jì)上的可行性工藝路線設(shè)置為手工上料、機(jī)器人自動焊接、手工下料三個工序。
焊接機(jī)器人工作站主要由兩套伺服控制頭位架變位機(jī)、兩套焊接可翻轉(zhuǎn)夾具、一套機(jī)器人本體、焊接控制圖焊接機(jī)器人工作站焊接示意圖系統(tǒng)及移動滑臺等組成即系統(tǒng)具有如下特點節(jié)拍的緊湊性。
該系統(tǒng)具有兩個裝夾工作臺操作者在機(jī)器人對其中一個工作臺上的工件進(jìn)行焊接時可完成另一工作臺上的工件的裝夾體現(xiàn)了系統(tǒng)節(jié)拍的緊湊性。
塞拉門型號規(guī)格改變時只須對焊接機(jī)器人工作站的作業(yè)文件進(jìn)行修訂即可。
防護(hù)可靠性。
系統(tǒng)采用整體防護(hù)安全可靠。
在機(jī)器人焊接時在電弧與操作者之間有可升降的遮光板避免電弧上傷害操作者的眼睛。
焊接機(jī)器人工作站焊接示意圖如圖。
焊接節(jié)拍計算機(jī)器人焊接節(jié)拍分析的依據(jù)見表焊接速度‖焊接輔助時間每條焊縫取秒包括機(jī)器人兩次加減速時間及空程運動時間、起弧時間、收弧時間頭位架變位機(jī)翻轉(zhuǎn)時間秒。
由于提供資料有限故節(jié)拍分析為估算值估算依據(jù)焊縫條數(shù)條、每條焊縫長度。
表節(jié)拍計算焊縫數(shù)焊縫焊接輔助手工焊接總長度時間時間上料節(jié)拍條”秒秒秒秒輔助時間包括系統(tǒng)響應(yīng)、翻轉(zhuǎn)換位手工上料下料時間計算略。
生產(chǎn)效率計算生產(chǎn)效率計算依據(jù)年有效工作日天單班工作日每班小時設(shè)備利用率。
工作站年單班產(chǎn)量××件年工作站配置根據(jù)以上分析工作站平面布置見圖。 
系統(tǒng)運作程序操作者在樣工作臺裝夾工件后給出指令機(jī)器人動作轉(zhuǎn)身至焊接位置遮光板升高機(jī)器人開始按照作業(yè)文件執(zhí)行焊接命令完成面的焊接位伺服控制頭位架變位機(jī)與焊接可翻轉(zhuǎn)夾具進(jìn)行工件的翻轉(zhuǎn)、裝夾弧焊機(jī)器人進(jìn)行面的焊接在、步驟進(jìn)行時操作者在工作臺工件的裝夾遮光板升高弧焊機(jī)器人完成面的焊接對焊槍嘴進(jìn)行清理為下一個工作周期做準(zhǔn)備接著重復(fù)—運作步驟焊接工作臺的工件同時卸下位上已完成焊接的工件并裝夾另一工件。
主要設(shè)備分析弧焊機(jī)器人本體——。
驅(qū)動交流伺服電機(jī)。
控制方式絕對值編碼器。
自由度。
重復(fù)定位精度±。
負(fù)載能力。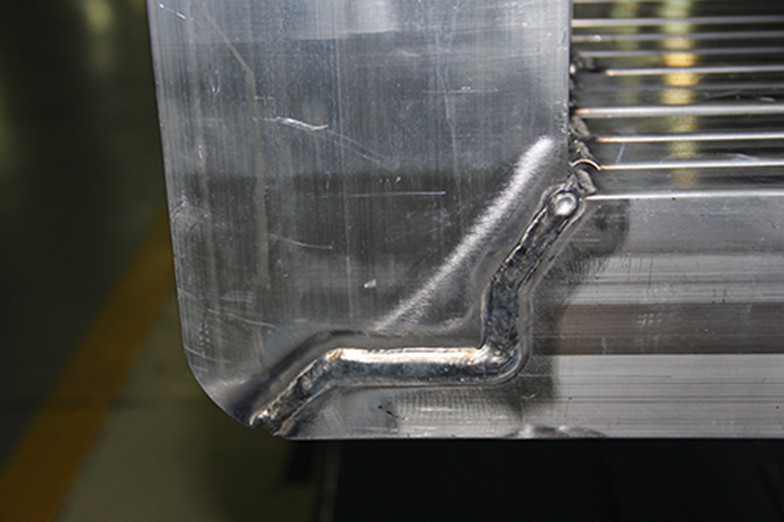
機(jī)器人控制柜。
運動控制包括機(jī)器人本體的運動控制、外部軸運動控制、周邊作業(yè)裝置控制。
焊接參數(shù)控制焊接電源的電壓控制、焊接電流控制多方式起弧、收弧控制焊接參數(shù)的自動提示功能。
控制裝置的主要功能。
示教方式示教盒程示數(shù)。
控制方式點位運動控制、軌跡運動控制。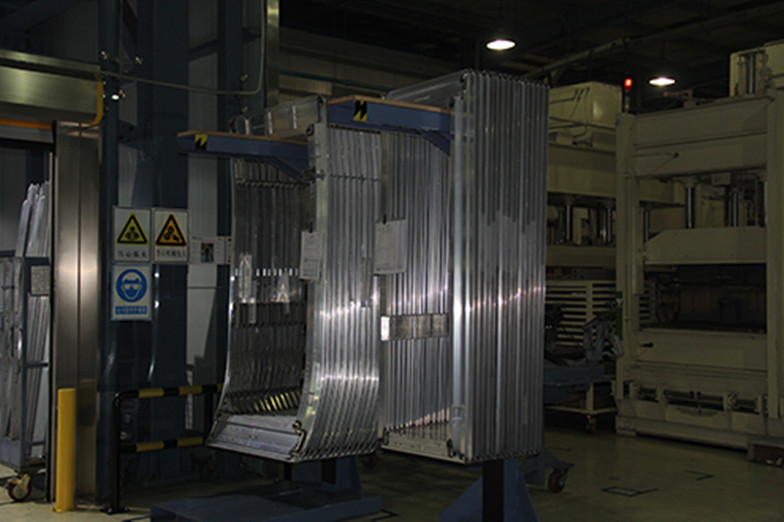
序號
項目
內(nèi)容
1
基本配置
龍門雙機(jī)+X、Y方向行走+四工位H型頭尾架變位機(jī))
2
完焊率
100%
3
節(jié)拍
30min/件
4
焊接電源
奧地利福尼斯TPS4000